Notes of Neural Networks
Model Representation
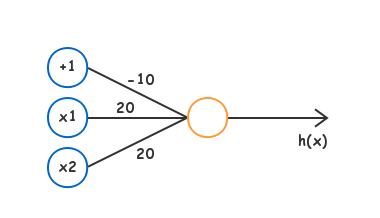
Neuron
Neural Network
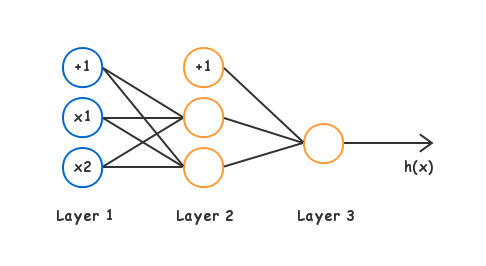
\(\begin{bmatrix} x_1 \newline x_2 \newline x_3 \newline \end{bmatrix} \rightarrow \begin{bmatrix} a_1^{(2)} \newline a_2^{(2)} \newline a_3^{(2)} \newline \end{bmatrix} \rightarrow h_\theta(x)\)
\(a^{(l)} = g(\Theta^{(l-1)} a^{(l-1)})\)
where
\(\;\;\) \(l\): index of layer
\(\;\;\) \(a^{(l)}\): "activation" in layer \(l\)
\(\;\;\) \(a_i^{(l)}\): "activation" of unit \(i\) in layer \(l\)
\(\;\;\) \(a_0^{(l)} = 1\): bias units
\(\;\;\) \(a^{(1)} = x\): input layer
\(\;\;\) \(\Theta^{(l)} \in \mathbb{R} ^ {s_{l+1} \times (s_l + 1)}\): matrix of weights
\(\;\;\) \(s_l\): number of units in layer \(l\)
Multiclass Classification
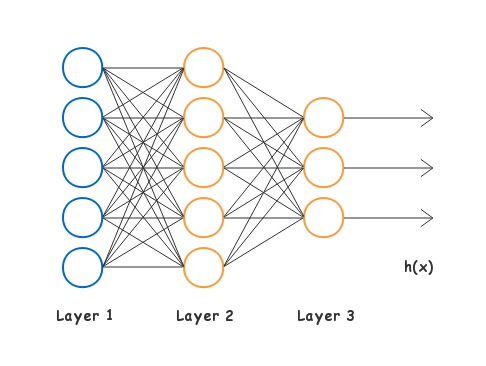
\(y \in \lbrace \begin{bmatrix} 1 \newline 0 \newline \vdots \newline 0 \end{bmatrix} , \begin{bmatrix} 0 \newline 1 \newline \vdots \newline 0 \end{bmatrix} \dots \begin{bmatrix} 0 \newline 0 \newline \vdots \newline 1 \end{bmatrix} \rbrace\)
\(h_\Theta(x) \in \mathbb{R} ^ {K}\)
\(\mathrm{prediction} = \max_k(h_\Theta(x)_k)\)
where
\(\;\;\) \(K\): number of classes
Cost Function
\(\displaystyle \begin{gather} J(\Theta) = - \frac{1}{m} \sum_{i=1}^m \sum_{k=1}^K \left[ y^{(i)}_k \log((h_\Theta(x^{(i)}))_k) + (1 - y^{(i)}_k) \log(1 - (h_\Theta(x^{(i)}))_k) \right] + \frac{\lambda}{2m} \sum_{l=1}^{L-1} \sum_{i=1}^{s_l} \sum_{j=1}^{s_{l+1}} (\Theta_{j,i}^{(l)})^2 \end{gather}\)
where
\(\;\;\) \(L\): total number of layers
\(\;\;\) \(K\): number of classes / output units
\(\;\;\) \(s_l\): number of units in layer \(l\)
The double sum simply adds up the logistic regression costs calculated for each cell in the output layer The triple sum simply adds up the squares of all the individual \(\Theta\)s in the entire network
Back Propagation
Goal: \(minimize _\Theta J(\Theta)\)
Computing Partial Derivatives
TODO
Unrolling Parameters
For example, \(\Theta^{(1)} \in \mathbb{R} ^ {10 \times 11}\), \(\Theta^{(2)} \in \mathbb{R} ^ {10 \times 11}\), \(\Theta^{(3)} \in \mathbb{R} ^ {1 \times 11}\)
Unroll:
1 | unrolledTheta = [Theta1(:); Theta2(:); Theta3(:)] |
Reshape:
1 | Theta1 = reshape(unrolledTheta(1:110), 10, 11) |
Gradient Checking
Check that \(\displaystyle \frac{\partial}{\partial \Theta} J(\Theta) \approx \frac{J(\Theta + \epsilon) - J(\Theta - \epsilon)}{2 \epsilon}\)
where
\(\;\;\) \(\epsilon\): a small value, usually set to \(10^{-4}\)
Random Initialization
Initialize each \(\Theta_{ij}^{(l)}\) to a random value in \([-\epsilon, \epsilon]\)
where
\(\;\;\) \(\epsilon = \frac{\sqrt{6}}{\sqrt{L_{in} + L_{out}}}\)
\(\;\;\) \(L_{in} = s_l\)
\(\;\;\) \(L_{out} = s_{l+1}\)
Network Architecture
- Number of input units = dimension of features \(x^{(i)}\)
- Number of output units = number of classes
- Number of hidden units per layer = usually more the better (cost of computation increases with more hidden units)
- Number of hidden layers = defaults 1 (if > 1, it is recommended to have same number of units in every hidden layer)
Summary
- Randomly initialize weights
- Implement forward propagation to get \(h_\Theta(x^{(i)})\) for any \(x^{(i)}\)
- Implement code to compute cost function \(J(\Theta)\)
- Implement back propagation to compute partial derivatives
- Use gradient checking to confirm that back propagation works (then disable gradient checking)
- Use gradient descent or advanced optimization method with back propagation to minimize \(J(\Theta)\) as a function of \(\Theta\)